Configure System Utility
All Settings in the ConfigureSystem utility are global to the system. The settings will affect execution of every print job. All distance variables are in millimetres. All time variables are in milliseconds. (1 second = 1000 milliseconds)Navigation
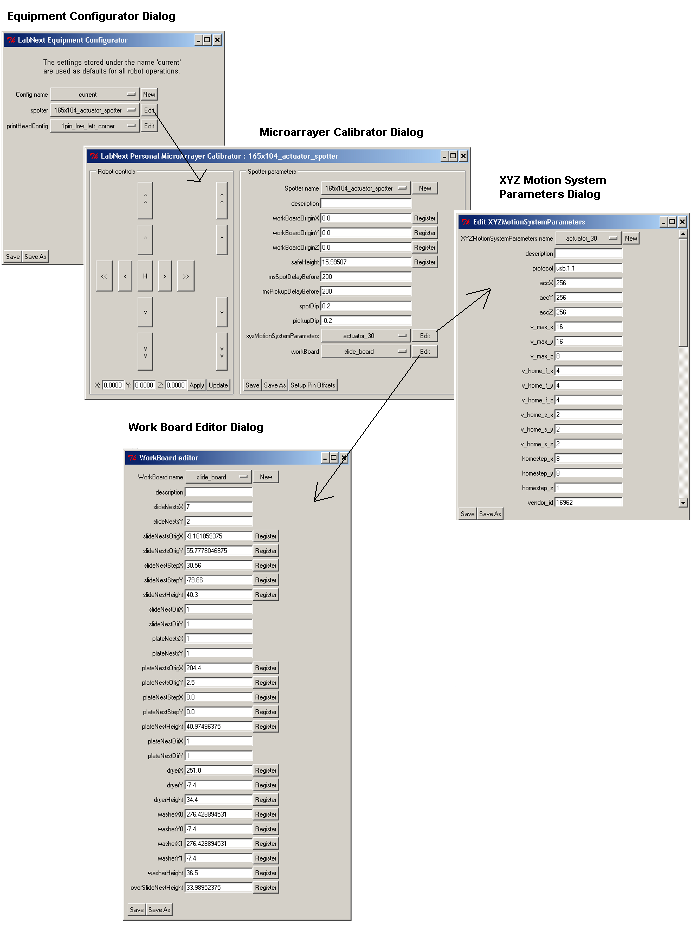
Equipment Configurator Dialog
Config name - System configuration name. "Current" is used by Job Wizard as default. New print jobs are always created for the Current configuration. All other configuration names are user defined. spotter - Spotter configuration name used in the given System Configuration. NOTE: Editing Spotter Configuration is only possible if the arrayer is connected to the USB port of the computer. printHeadConfig - Default print head configuration that will show up in the Job Wizard when editing a new Print Job. Please refer to JobWizard manual ( Step 4 section ) for description of the fields.
Microarrayer Calibrator Dialog
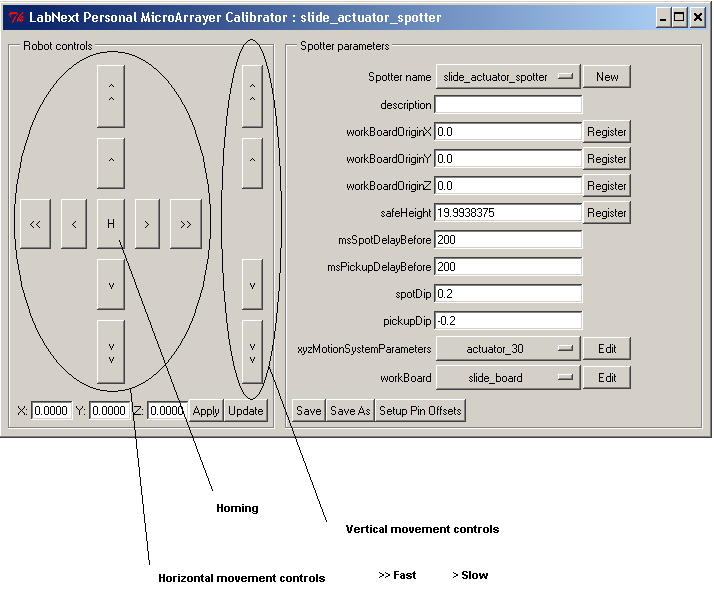
"Spotter parameters" Tab
description - Free format description of the Spotter Configuration. workBoard - Name of the work board configuration used in the given Spotter Configuration xyzMotionSystemParameters - Set of parameters for the spotter controller such as speed and acceleration. workBoardOriginX workBoardOriginY workBoardOriginZ - 3D coordinate of the origin of the work board. All coordinates of the work board objects such as washer/dryer, source plates, substartes are measured relative to the work board origin. Parameter is convenient for the "integrated" work board where all objects attached to one solid panel. If the work board objects attached directly to the main panel of the arrayer ( "modular" work board) parameter can be set to any value such as 0,0,0. 0,0,0 coordinate is the "Home" position of the system. safeHeight - Hight of the head over the work board when the pin can not hit any element. Transition of the pin between work board elements takes place always at the "safe hight" realtive to HOME Z. ( Except for transitions between substrates which is done at "overSlideNestHeight" ). ALWAYS start calibration with setting the "safeHeight" parameter. msSpotDelayBefore - delay in msec after the pin reaches X-Y position over the substrate and before it starts descending to make a spot. Delay might be necessary when printing high density arrays to eliminate vibrations in the system caused by lateral movement of the motion system. It is non important for printing spots over 100um diameter. msPickupDelayBefore - delay in mces after the pin reaches position over the source well and before it goes into the well for pick-up. spotDip - vertical distance the pin travels down after reaching the surface of the substrate (the latter is defined by "slideNestHeight" and substrate "thickness" parameters. ) pickupDip - vertical distance the pin travels down after reaching the height of the source plate when making sample pick-up. (the latter is defined by "plateNestHeight" and plate "thickness" parameters.) File system location: C:\labnext\PRODUCTION_DATA\Spotter"Robot controls" Tab
See the screenshot for control buttons functions.Work Board Editor Dialog
description - Free format description slideNestsX - number of substrates (slides of microplates) along X axis (left - right) slideNestsY - number of substrates along Y axis (front - back). slideNestsOrigX - slideNestsOrigY - X and Y coordinates of LEFT-BACK corner of the LEFTMOST substrate in the FRONT row relative to workBoardOriginX and Y slideNestHeight - Z coordinate surface of the substrate holders relative to workBoardOriginZ slideNestStepX - slideNestStepY - distance between substrates along X and Y axis slideNestDirX slideNestDirY - values 1 or -1. Direction of increasing the substrate position index from system Home. plateNestsX - plateNestsY - number of source plate holders along X and Y axis. plateNestsOrigX plateNestsOrigY - X coordinate of LEFT-BACK corner of the LEFTMOST source plate in the FRONT row relative to workBoardOriginX and Y. plateNestStepX plateNestStepY - distance between plate holders along X and Y axis plateNestDirX plateNestDirY - values 1 or -1. Direction of increasing the source plate holder position index from system Home. plateNestHeight - Z coordinate surface of the source plate holder relative to workBoardOriginZ dryerX dryerY dryerHeight - X,Y,Z coordinate of the dryer LEFT-BACK hole relative to workBoardOriginX, Y and Z. washerX0 washerY0 washerX1 washerY1 washerHeight - X,Y,Z coordinate of the washer LEFT-BACK hole relative to workBoardOriginX, Y and Z. IMPORTANT: for washers with holes always set X0 = X1 and Y0 = Y1 If the above coordinates are differ the pin will start moving back and forth (10 times) between the different positions. This feature is developed for open reservoir washers. overSlideNestHeight - Hight at which the pin travels over the substrate holders in transition between the substrates relative to workBoardOriginZ. File system location: C:\labnext\PRODUCTION_DATA\Spotter\WorkBoard
XYZ Motion System Parameters Dialog
description - Free format description; protocol: usb.1.1; (do not modify) accX accY accZ - acceleration rates for X, Y and Z axis. The value indicates how many steps stepper motor makes to reach maximal speed ( variable v_max_x, y or z). HIGHER values corresponds to SLOWER acceleration. Typical values are between 64 and 256. High acceleration rates result in extra stress on the system and lead to reduce accuracy but faster transitions. Slower accelerations improve accuracy but slower operations. With slower acceleration and on short transitions the system may never reach maximal speed. v_max_x v_max_y v_max_z - speed rates for X, Y and Z axis. The value indicates steps/sec steppes motors should reach. Typical values in 16 - 64 range. v_home_f_x v_home_f_y v_home_f_z - DO NOT MODIFY. speed rate for approaching HOME position. v_home_s_x: 2; v_home_s_y: 2; v_home_s_z: 2; - DO NOT MODIFY. speed rate for seeking HOME position. homestep_x: 8; homestep_y: 8; homestep_z: 1; - DO NOT MODIFY. increment rate rot approaching HOME position vendor_id: 16962; - DO NOT MODIFY product_id: 16897; - DO NOT MODIFY xMotorNetaddress: 0; OBSOLETE yMotorNetaddress: 1; OBSOLETE zMotorNetaddress: 2; OBSOLETE xUseFullStep: 1; OBSOLETE yUseFullStep: 1; OBSOLETE zUseFullStep: 0; OBSOLETE inputScannerNetaddress: 3; OBSOLETE relayDriverNetaddress: 4; OBSOLETE xLimitSensorChannel: 0; DO NOT MODIFY yLimitSensorChannel: 1; DO NOT MODIFY zLimitSensorChannel: 2; DO NOT MODIFY washerRelay: 0; OBSOLETE dryerRelay: 1; OBSOLETE xmmPerStep: 0.0238125; ymmPerStep: 0.0238125; zmmPerStep: 0.015876; DO NOT MODIFY. Transmission rates for X, Y and Z actuators. xmmTravelRange0: -25.0; xmmTravelRange1: 268.0; ymmTravelRange0: -27.0; ymmTravelRange1: 148.0; zmmTravelRange0: -1.0; zmmTravelRange1: 60.0; DO NOT MODIFY. Maximal travel distances for X, Y and Z axis from HOME position. xDirectionToHome: 1; yDirectionToHome: -1; zDirectionToHome: 1; DO NOT MODIFY. Motors rotation directions for approaching HOME position.